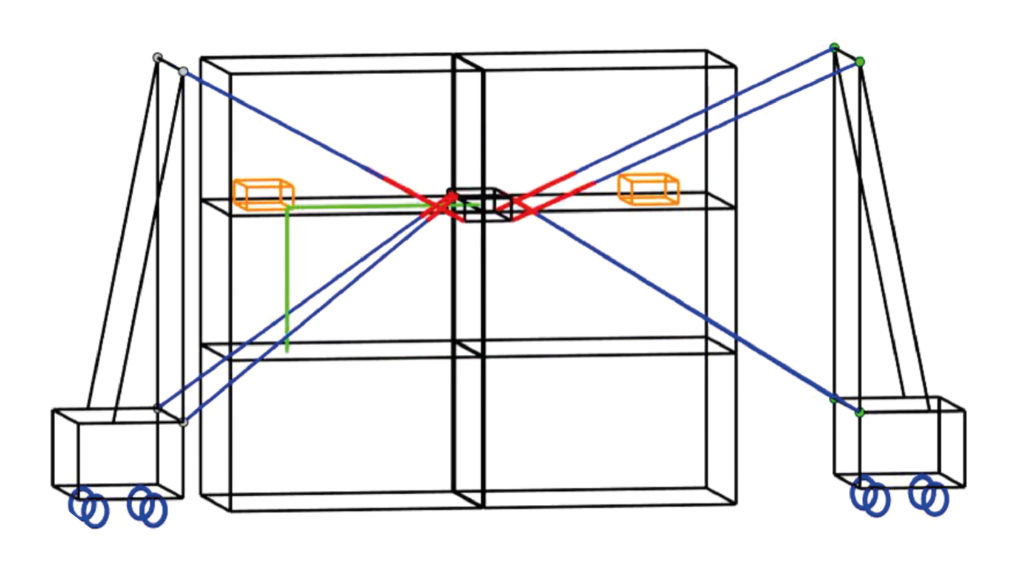
The objective of project FASTKIT is to provide a low cost and versatile robotic solution for logistics using a unique combination of mobile robots and Cable-Driven Parallel Robot (CDPR). The FASTKIT prototype addresses an industrial need for fast picking and kitting operations in existing storage facilities while being simple to install, maintaining existing infrastructures and covering large areas.
Industrial context
For the past 5 years, automated technical solutions for picking have been emerging in the areas of production or logistics. The Fastkit robot presents a new technical solution that could help to bring more flexibility and versatility compared to existing solutions.
Innovative features of the project
Industrial applications and development
FASTKIT targets industries in the logistics industry but also enables intra-logistics operations within the retail automotive or aeronautics industries, where kitting bins have to be prepared. In fact bin picking algorithm and specific manipulators effector have to be developed for the automation of kit preparation. In order for the FASTKIT solution to be viable on the market, it would have to be adaptive to the needs of several industries.
Contact:
IRT Jules Verne
Alexis Girin
R&T Manager, Robotic and Cobotic
Email: [email protected]
Internet: www.irt-jules-verne.fr
CNRS
Pascal Dayez-Burgeon
Email: [email protected]
Internet: www.cnrs.fr







