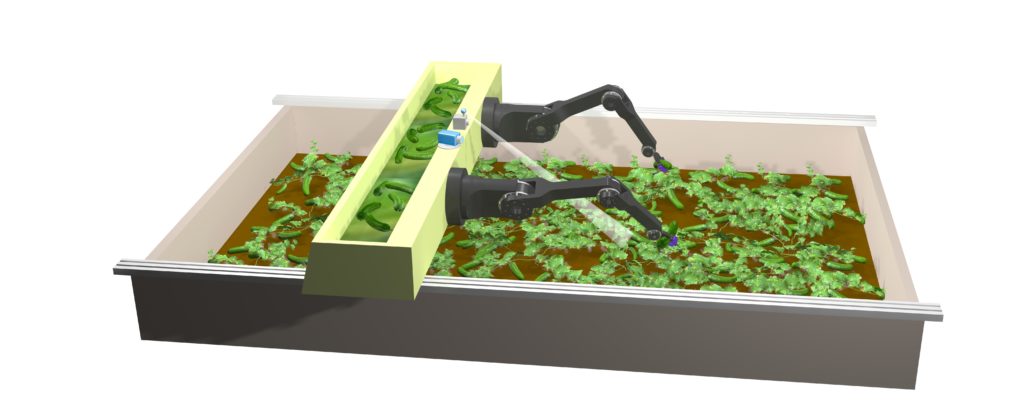
CATCH – Cucumber Gathering – Green Field Experiments
The CATCH experiment aims at developing a flexible, cost-efficient and reconfigurable/scalable hortibotic outdoor solution for automated harvesting in challenging natural conditions. To address critical problems, such as fruit perception and fast picking actions, the use case of outdoor cucumber harvesting has been selected, taking into account the needs from relevant end-users, the technological challenges, as well as the economic impact in various European regions.
For further information, see: http://catch-echord.blogspot.com.es/p/blog-page.html
Contact:
IPK Fraunhofer
Dr. Dragoljub Surdilovic
Email: [email protected]
Internet: http://www.ipk.fraunhofer.de/
CSIC-UPM Centre for Automation and Robotics
Dr. Roemi Fernandez
Email: [email protected]
Internet: www.car.upm-csic.es
Leibniz-Institut für Agrartechnik und Bioökonomie Potsdam-Bornim e.V. (ATB) Technik im Gartenbau
Dipl.-Ing. Jelena Surdilovic
E-mail: [email protected]
Internet: https://www.atb-potsdam.de/en/institute/about-us/start.html


Social





